BLAZER III and BLAZER III Pro drones are designed for 3D mapping and tasks that require a stable platform and flight time up to 40-50 min.
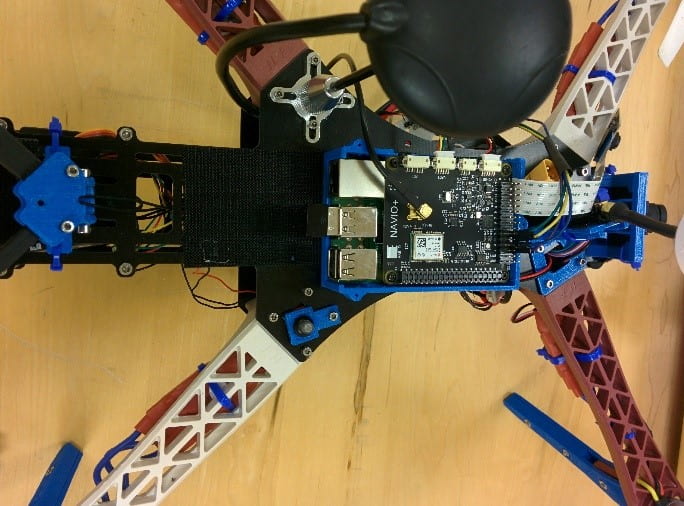
BLAZER III Pro is in the prototyping phase and will run Raspbian Linux and sensor fusion with Kalman filter for improved stabilization and localization. The drone is designed for inspecting infrastructure and carry specialized cameras. UABCL is developing computer vision algorithms with OpenCV to support control in the multirotor drone and is currently testing advanced sensor mapping using LIDAR.



Published by